Basketball Robot
This robot is a competitive robot that was made to cycle balls and shoot balls into a rim. It has a 4 motor omni-directional drivetrain and a 600RPM intake system. It encorporates encoder-embedded tracking wheels and inertial sensors.
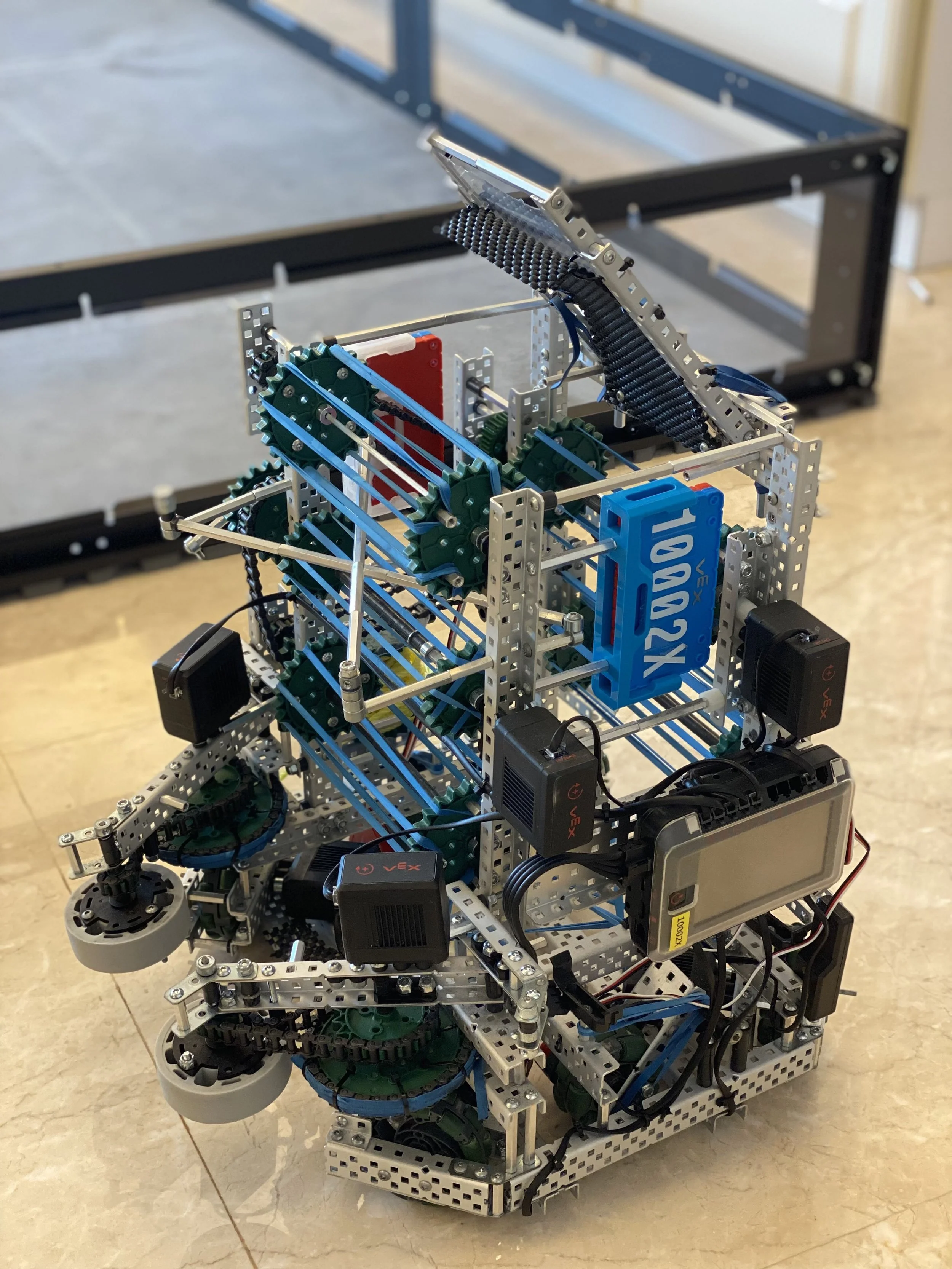
This is a 15-second autonomous routine performed by the robot. Controls and consistency achieved via position tracking, inertial nagivation control, and PID.